困ったことに数台のNXTがこの状態になってしまい、ソフト開発の効率が落ちてしまった
保証期間も切れているので、改造して修理することにした
ETロボコンのルールでNXTの改造はルール違反なので、大会での使用は出来なくなる。間違って持って行かない為のルールをメンバと決めて改造(修理)することにした。
以下の改造行為は、保証が受けられなくなります。また、ETロボコンの大会で使用することができなくなります。ハンダ付けにテクニックが必要です。この行為に責任は持ちません

これが壊れて音が鳴らなくなったNXT

電池を取り外し、4箇所のネジを取り外します

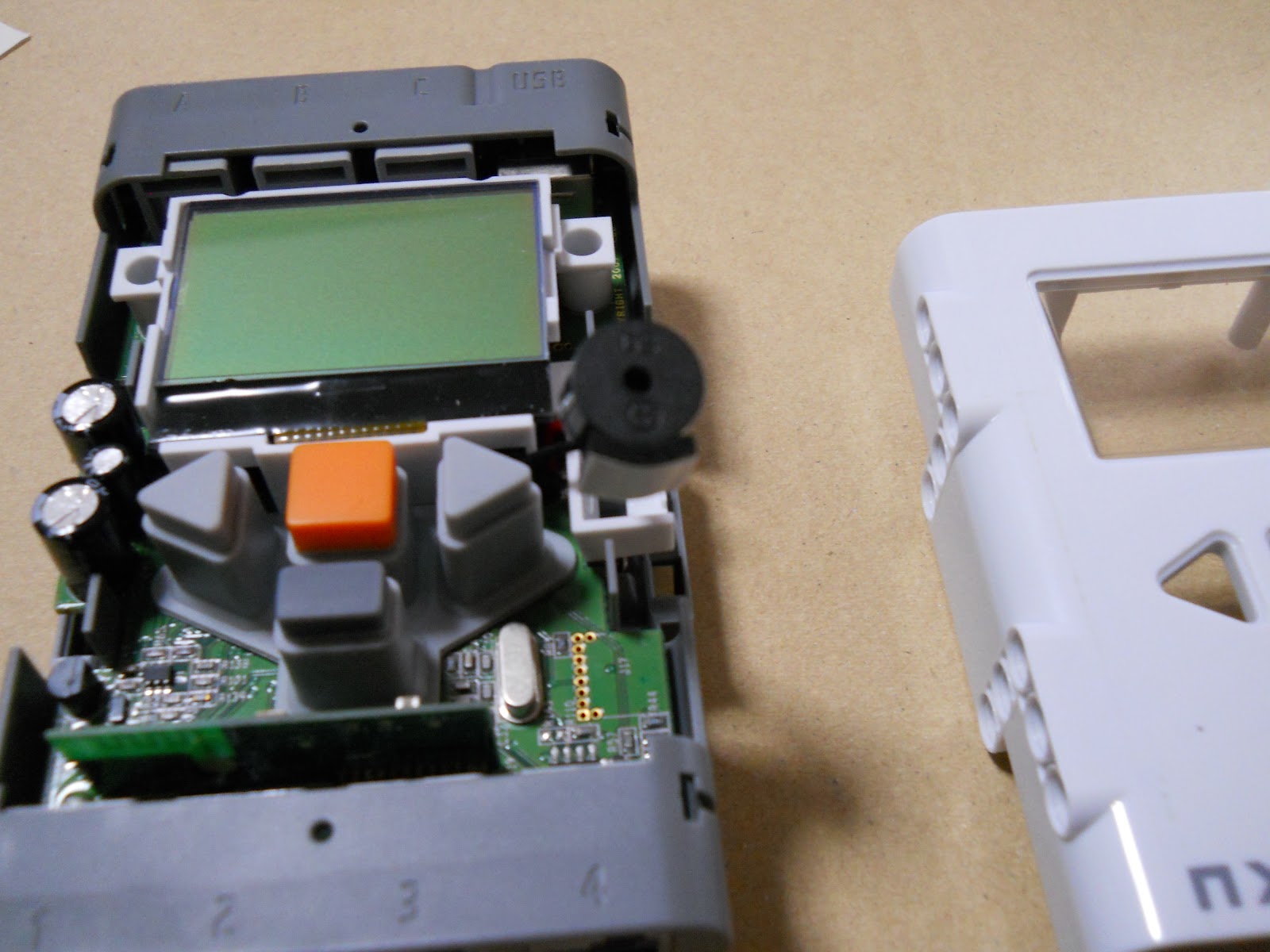
ネジを取り外すと、白色のカバーが取り外せます。中央右にスピーカーが付いています。

スイッチを取り外します。ディスプレイ横にネジがありますが、先にスピーカーを外します。結構しっかり両面テープで付いています。その後でディスプレイ横のネジを外します

スピーカーを外したところです

ディスプレイを持ち上げて、スピーカーの線が付いている所のハンダを外します

スピーカーを取り外しました

今回は、このスピーカーを取りけます

ターミナルを切り離し芯線を少し出して、ハンダを付けておきます

スピーカーの配線をハンダ付けします。ディスプレイを無理して持ち上げるとFPCが切れる場合があります。配線の赤と黒はこの配置にしました

ディスプレイとスイッチを取り付けた所
スイッチの下に両面テープを貼ります(スポンジ付き)

スイッチに邪魔にならない様に配線を取り回して、水晶の上に両面テープで貼り付けました
この位置だと蓋が閉まりました

ネジを4箇所取りけて完了です
電池を入れて、テストすると音がするようになりました
ディスプレイを取り付けている白い台の形状が違うNXTがあります。こちらは、FPCでなくコネクタで付いているので改造しやすいです